One Runner
One Runner
At Louis Martin, we believe that every great invention starts with a bold idea. Our mission is to empower visionaries and innovators to bring their ideas to life, turning concepts into tangible solutions.
At Louis Martin, we believe that every great invention starts with a bold idea. Our mission is to empower visionaries and innovators to bring their ideas to life, turning concepts into tangible solutions.
At Louis Martin, we believe that every great invention starts with a bold idea. Our mission is to empower visionaries and innovators to bring their ideas to life, turning concepts into tangible solutions.
At Louis Martin, we believe that every great invention starts with a bold idea. Our mission is to empower visionaries and innovators to bring their ideas to life, turning concepts into tangible solutions.
HUMANOID SOCCER LEAGUE (HSL), MECHATRONICS RESEARCH LAB, QIAU
Year
2022
Category
Portfolio
Live Project
View Now

Collaborative Design
Collaborative Design
Collaborative Design
/// Informing decision-making: Research provides data and evidence to support design decisions. It helps designers make informed choices about layout, color schemes, typography, and other design elements, leading to more effective and user-friendly websites
/// Informing decision-making: Research provides data and evidence to support design decisions. It helps designers make informed choices about layout, color schemes, typography, and other design elements, leading to more effective and user-friendly websites
/// Informing decision-making: Research provides data and evidence to support design decisions. It helps designers make informed choices about layout, color schemes, typography, and other design elements, leading to more effective and user-friendly websites
" height="167px" id="cyqDoSKRd" width="1390px"/></g></svg>)

It’s not just me, it’s all of us!
MRL-HSL is made up of three main sub-teams
MRL-HSL is made up of three main sub-teams
MRL-HSL is made up of three main sub-teams

Electronics
Software

Mechanics

We began with a kid-size humanoid robot, but to compete in the Teen Size category we needed a completely new platform. I designed this robot by drawing inspiration from our kid-size model, as well as NAO, DARwIn-OP, and human golden-ratio proportionOPs.
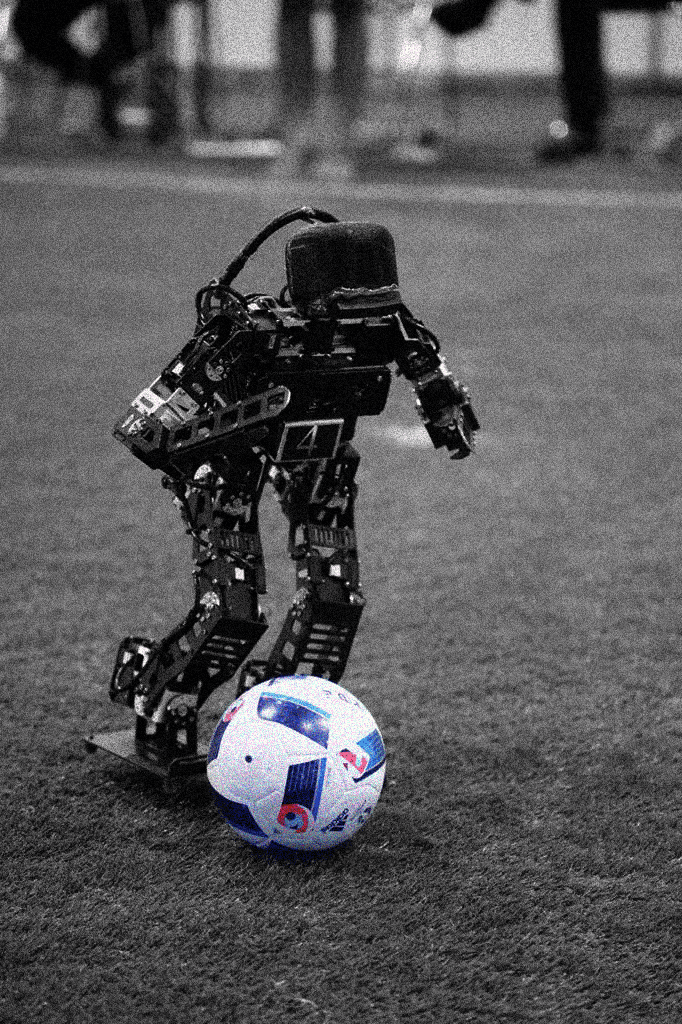
The kid-size platform gave us a clear baseline for joint alignment, actuator range, and overall body proportions. Analyzing its performance on grass, weight distribution, and kicking stability helped define the mechanical requirements for the teen-size robot.
Kid-size robot
We began with a kid-size humanoid robot, but to compete in the Teen Size category we needed a completely new platform. I designed this robot by drawing inspiration from our kid-size model, as well as NAO, DARwIn-OP, and human golden-ratio proportionOPs.
The kid-size platform gave us a clear baseline for joint alignment, actuator range, and overall body proportions. Analyzing its performance on grass, weight distribution, and kicking stability helped define the mechanical requirements for the teen-size robot.
Kid-size robot
Foundation Research
Foundation Research
Foundation Research
/// Informing decision-making: Research provides data and evidence to support design decisions. It helps designers make informed choices about layout, color schemes, typography, and other design elements, leading to more effective and user-friendly websites
/// Informing decision-making: Research provides data and evidence to support design decisions. It helps designers make informed choices about layout, color schemes, typography, and other design elements, leading to more effective and user-friendly websites
/// Informing decision-making: Research provides data and evidence to support design decisions. It helps designers make informed choices about layout, color schemes, typography, and other design elements, leading to more effective and user-friendly websites

6061-T6 aluminum
6061-T6 aluminum
6061-T6 aluminum

Studying Existing Platforms
Mechanical Joint Hardware
Mechanical Joint Hardware
Actuator Selection
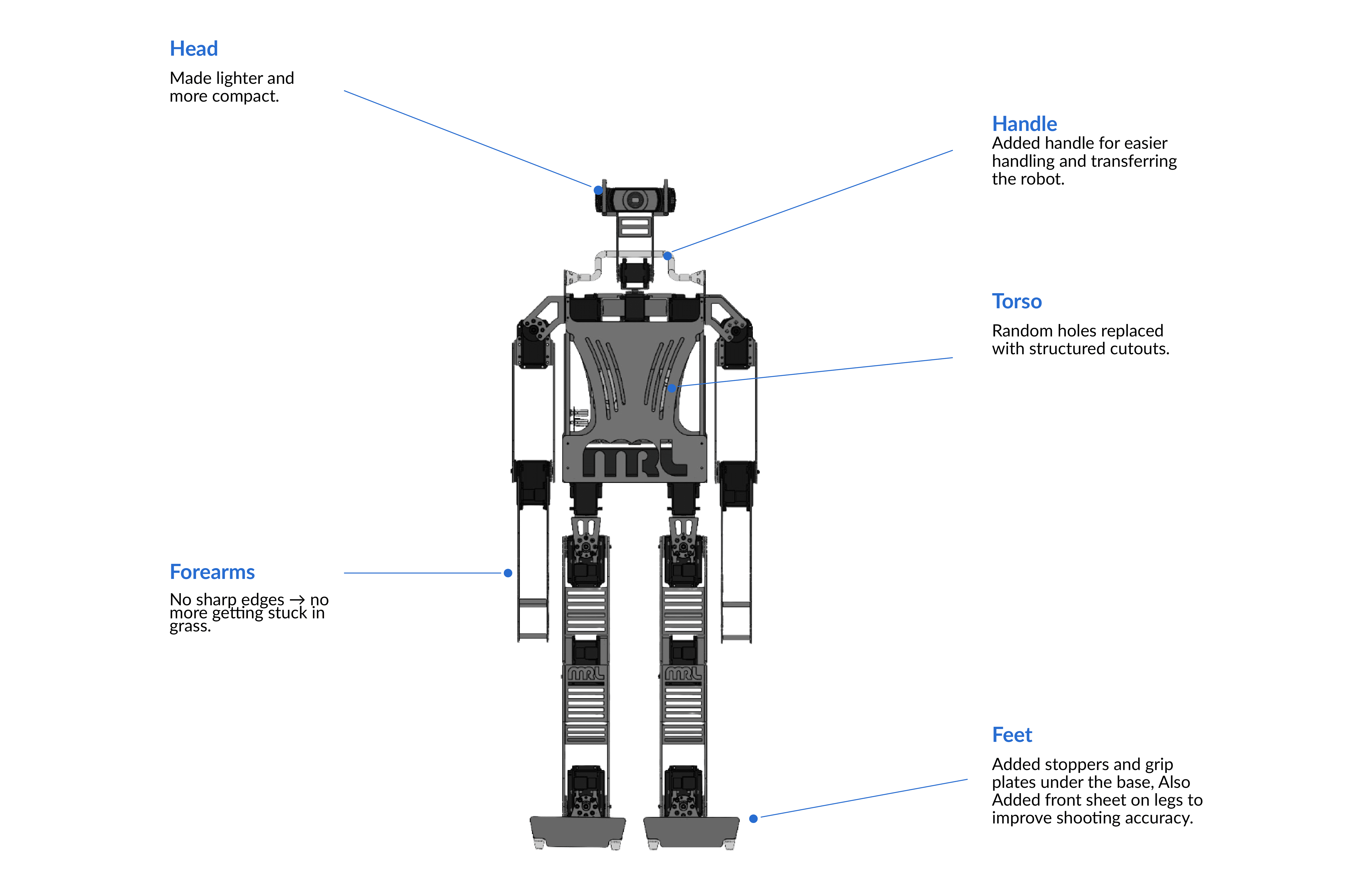
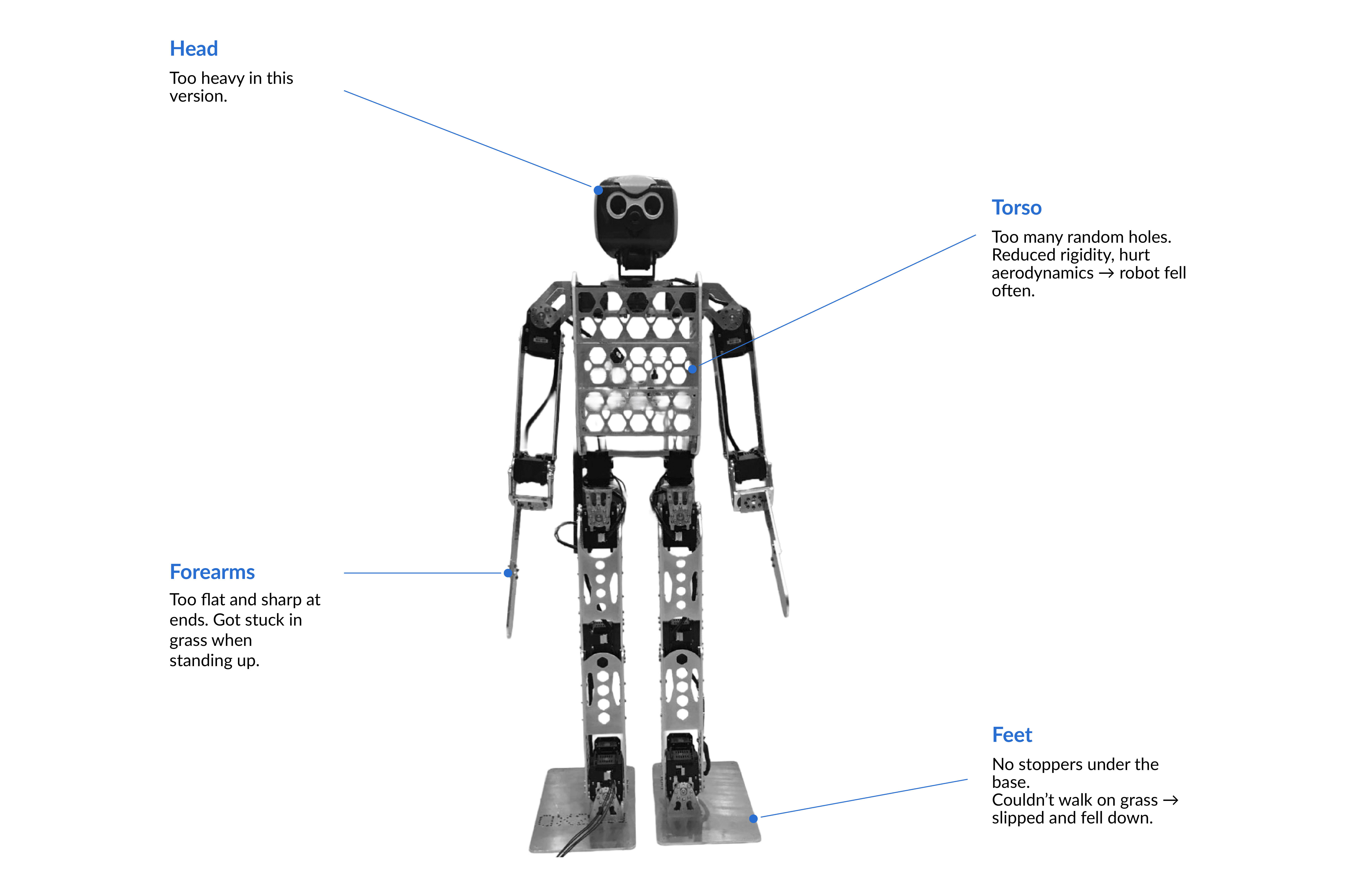
Prototype / Failed Version
Final / Improved Version