ARASH HUMANOID
ARASH HUMANOID
Arash is a humanoid soccer robot built in the MRL Humanoid Soccer League (HSL) at QIAU. Our goal was to create kid-size and teen-size players that could walk, kick, and handle RoboCup technical challenges while staying easy for a student team to maintain. I worked across mechanical design, control, and testing to keep the robot reliable on the field.
Arash is a humanoid soccer robot built in the MRL Humanoid Soccer League (HSL) at QIAU. Our goal was to create kid-size and teen-size players that could walk, kick, and handle RoboCup technical challenges while staying easy for a student team to maintain. I worked across mechanical design, control, and testing to keep the robot reliable on the field.
Arash is a humanoid soccer robot built in the MRL Humanoid Soccer League (HSL) at QIAU. Our goal was to create kid-size and teen-size players that could walk, kick, and handle RoboCup technical challenges while staying easy for a student team to maintain. I worked across mechanical design, control, and testing to keep the robot reliable on the field.
Arash is a humanoid soccer robot built in the MRL Humanoid Soccer League (HSL) at QIAU. Our goal was to create kid-size and teen-size players that could walk, kick, and handle RoboCup technical challenges while staying easy for a student team to maintain. I worked across mechanical design, control, and testing to keep the robot reliable on the field.
HUMANOID SOCCER LEAGUE (HSL), MECHATRONICS RESEARCH LAB, QIAU
Year
AGU 2017-JAN 2018
Category
MECHANICAL DESIGN · SIMULATION
Live Project
View Now
Collaborative Design
Collaborative Design
Collaborative Design
/// Every successful field run comes from iterative testing and redesign across multiple teams. My contribution focused on mechanical design, where I refined structure and motion while collaborating with electronics and software to ensure each mechanical decision supported their sensor, control, and integration needs.
/// Every successful field run comes from iterative testing and redesign across multiple teams. My contribution focused on mechanical design, where I refined structure and motion while collaborating with electronics and software to ensure each mechanical decision supported their sensor, control, and integration needs.
/// Every successful field run comes from iterative testing and redesign across multiple teams. My contribution focused on mechanical design, where I refined structure and motion while collaborating with electronics and software to ensure each mechanical decision supported their sensor, control, and integration needs.
" height="167px" id="cyqDoSKRd" width="1390px"/></g></svg>)
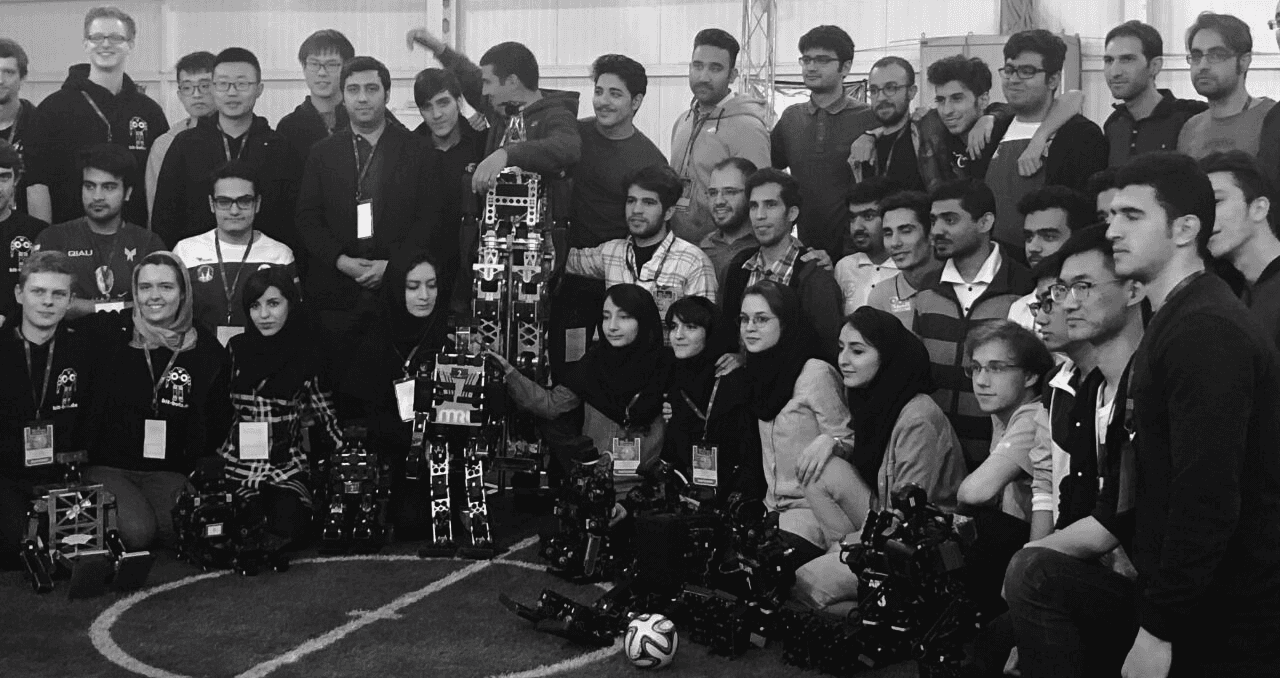
It’s not just me, it’s all of us!
MRL-HSL is made up of three main sub-teams
MRL-HSL is made up of three main sub-teams
MRL-HSL is made up of three main sub-teams

Electronics
Software

Mechanics

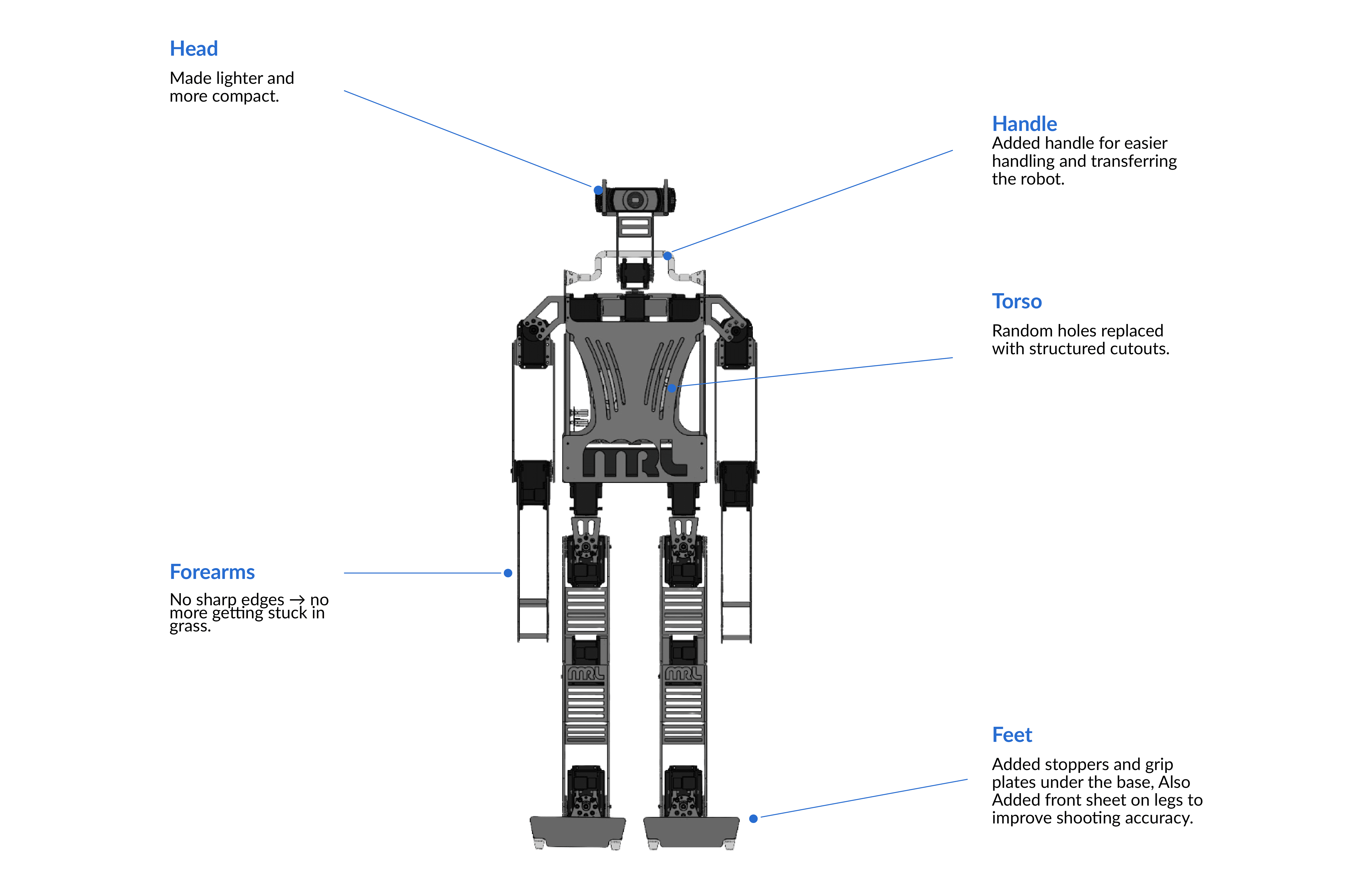
We began with a kid-size humanoid robot, but to compete in the Teen Size category we needed a completely new platform. I designed this robot by drawing inspiration from our kid-size model, as well as NAO, DARwIn-OP, and human golden-ratio proportionOPs.
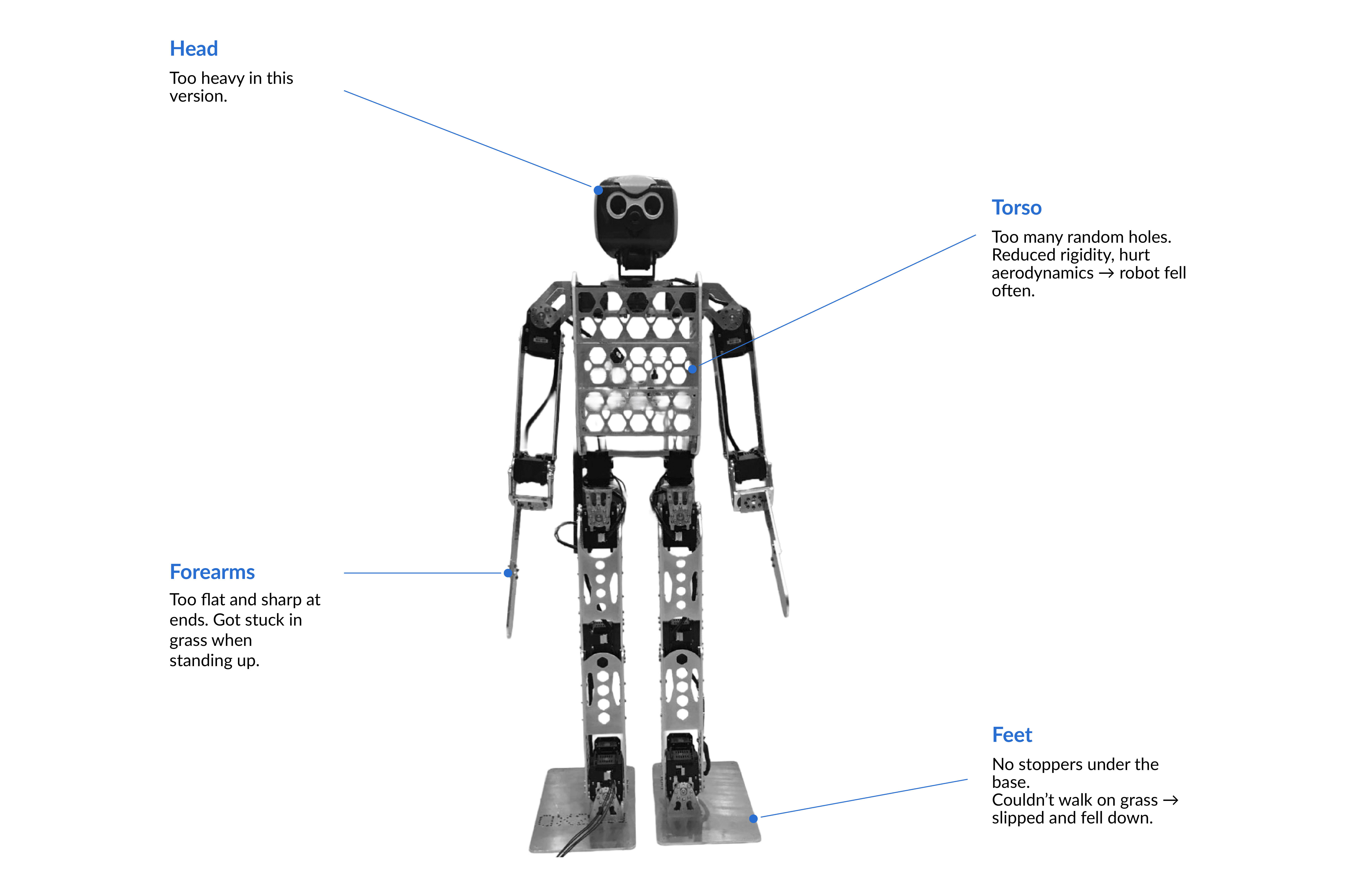
The kid-size platform gave us a clear baseline for joint alignment, actuator range, and overall body proportions. Analyzing its performance on grass, weight distribution, and kicking stability helped define the mechanical requirements for the teen-size robot.
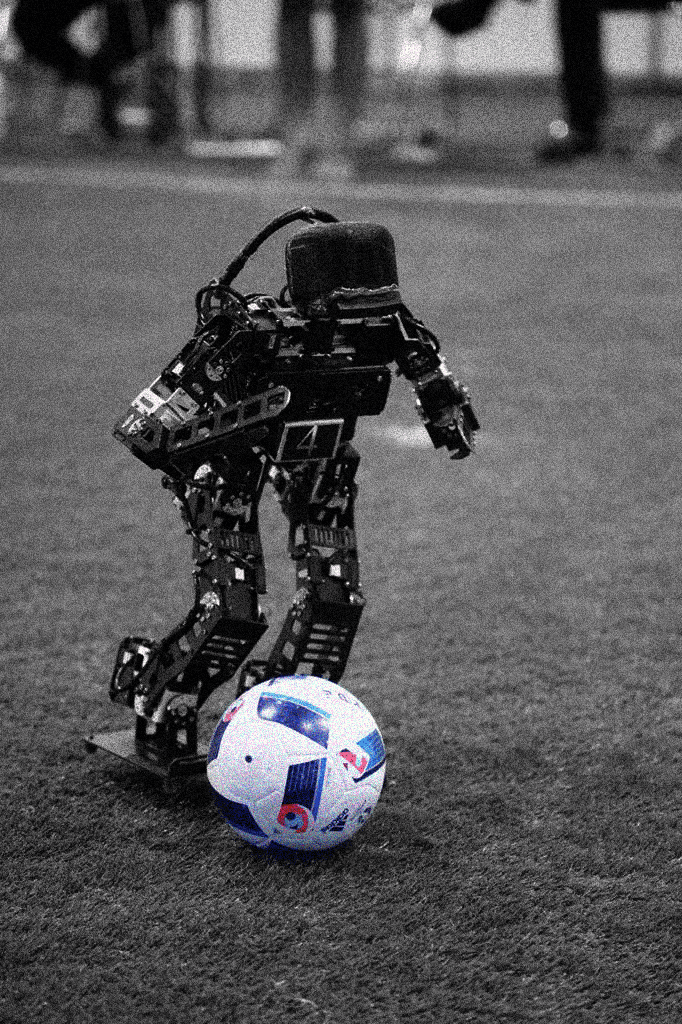
Kid-size robot
We began with a kid-size humanoid robot, but to compete in the Teen Size category we needed a completely new platform. I designed this robot by drawing inspiration from our kid-size model, as well as NAO, DARwIn-OP, and human golden-ratio proportionOPs.
The kid-size platform gave us a clear baseline for joint alignment, actuator range, and overall body proportions. Analyzing its performance on grass, weight distribution, and kicking stability helped define the mechanical requirements for the teen-size robot.
Kid-size robot
Foundation Research
Foundation Research
Foundation Research
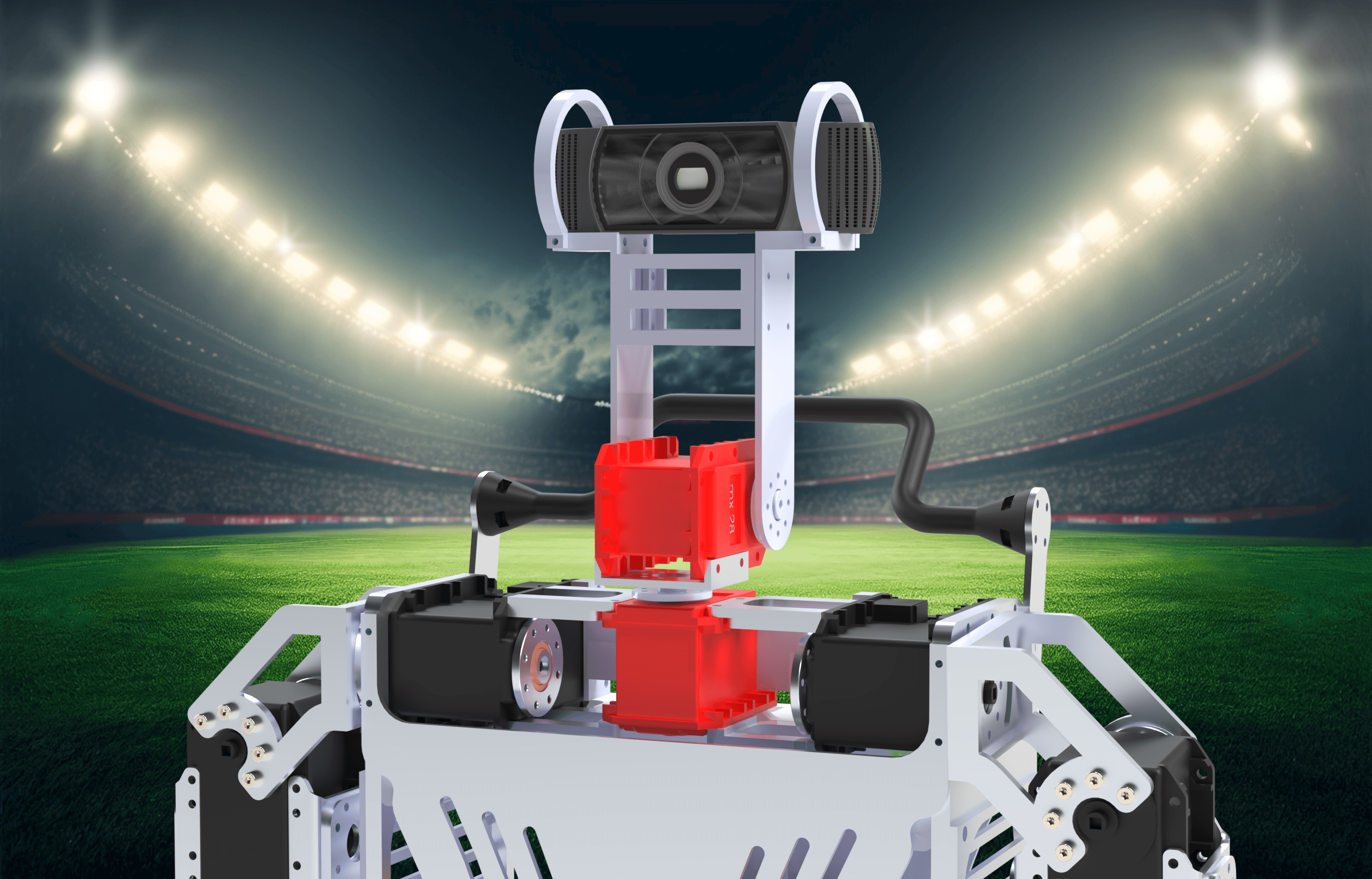
I explored screw types, actuator options, and material behaviors, selecting the final motor model with the electronics team. The body material had to resist deformation, avoid reflective surfaces that could disrupt vision systems, and still be easy to machine and polish. These early decisions guided the structure of the teen-size robot.
I explored screw types, actuator options, and material behaviors, selecting the final motor model with the electronics team. The body material had to resist deformation, avoid reflective surfaces that could disrupt vision systems, and still be easy to machine and polish. These early decisions guided the structure of the teen-size robot.
I explored screw types, actuator options, and material behaviors, selecting the final motor model with the electronics team. The body material had to resist deformation, avoid reflective surfaces that could disrupt vision systems, and still be easy to machine and polish. These early decisions guided the structure of the teen-size robot.

6061-T6 aluminum
6061-T6 aluminum
6061-T6 aluminum

Studying Existing Platforms
Mechanical Joint Hardware
Mechanical Joint Hardware
Actuator Selection
Prototype / Failed Version
Final / Improved Version